

대부분의 로봇은 구르거나, 날거나, 걷거나, 심지어 수영할 수도 있지만 움직임은 한 가지에만 국한되는 것이 대부분이고 둘 이상을 수행하는 경우는 거의 없다.
칼텍(켈리포니아공과대학 : Caltech)의 CAST(Centre for Autonomous Systems and Technologies) 엔지니어들은 거의 모든 작업을 수행하는 로봇을 제작하는데 성공했다.
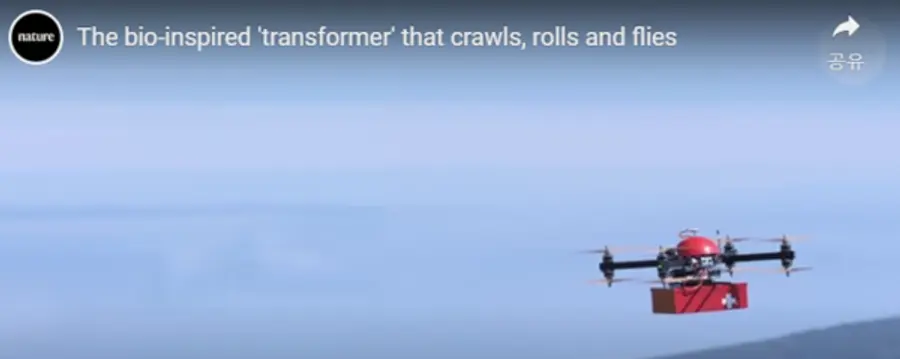
M4(Multi-Modal Mobility Morphobot용)는 지형에 관계없이 돌아다니도록 스스로 재구성할 수 있는 실제 트랜스포머이다.
CAST 팀은 M4가 하나 이상의 이동 수단을 가진 최초의 기계는 아니라는 점에 주목한다.

그러나 여러 개의 중복 시스템을 갖추지 않고 모든 움직임에 동일한 구성 요소를 사용한다는 점에서 독특하다. 이렇게 하면 M4를 작고 저렴하게 유지하는 동시에 동물이 하는 것과 같은 방식으로 '자세'를 변경할 수 있다.
"우리의 목표는 다양한 이동 모드로 탁월한 이동 기능을 보여주는 시스템을 설계하여 로봇 이동의 경계를 넓히는 것이었다."라고 공동 수석 연구원인 알리레사 라메사니(Alireza Ramezani)는 설명했다.
가장 단순한 형태의 모르포봇(Morphobot)은 4륜 로버이다. 그러나 바퀴는 굴러가는 것보다 더 많은 일을 할 수 있다.
M4가 바퀴를 수평으로 회전시키고 림 내부의 프로펠러를 발사하여 하늘로 날아가는 데 몇 초 밖에 걸리지 않는다.
관절식 휠 부착물은 M4 다재다능함의 핵심이다. 비행 중이 아닐 때 로봇은 휠 각도를 조정하여 낮은 장애물 아래로 미끄러질 수 있다.
발과 같은 바퀴를 사용하여 구르는 것을 방지하는 장벽 아래에서 흔들 수도 있다.
팀은 또 네 발 달린 동물이 뒷다리로 일어서는 방식에서 영감을 얻었다. M4도 같은 일을 할 수 있다.
장애물 너머를 보기 위해 뒷바퀴로 균형을 잡을 수도 있다. 팀은 체조를 할 때 프로펠러를 영리하게 활용하여 로봇을 안정시킨다.
![[스페이스X IPO] ②몸값 2조 달러, 유동주식은 5% 안팎](https://cdn.www.smarttoday.co.kr/w400/q85/article-images/2026-05-26/46dc88c7-a1f7-4410-b199-cbf045a3c31b.jpg)
![[스페이스X IPO] ①초대형 IPO, 시장 돈은 받고 경영권은 지킨다](https://cdn.www.smarttoday.co.kr/w400/q85/article-images/2026-05-26/15ed7156-8775-4137-932a-ac221baec135.jpg)
![[애플의 귀환] ②](https://cdn.www.smarttoday.co.kr/w400/q85/article-images/2026-05-13/216958c8-14a3-439a-8066-bf872b861d58.jpg)
댓글 (0)
댓글 작성
댓글을 작성하려면 로그인이 필요합니다.
로그인하기